Physics Modeling
Mechanics
Models in physics represent an approximation of the reality of Nature, each applicable in different circumstances.
Finding new physical approximations to support new observations that bring those approximations together in various theories represents progress in physics.
In this sense, mathematical approximations, together with the concepts that relate them to a part of Nature, are called models. The known mechanical models are:
1️⃣ Newtonian model or classical mechanics.
2️⃣ Special relativistic mechanics.
3️⃣ Quantum mechanics or wave mechanics.
In this text we will describe the Newtonian model or classical mechanics.
From a historical perspective, Newtonian mechanics systematized what is now called physics. It models the everyday world contemplated through the following conditions of observed objects:
- Objects that are not very large, such as galaxies.
- Not too small, as in atoms.
- When in motion, they don’t travel at excessively high speeds, being small compared to the speed of light.
The motion of such objects is successfully described by classical mechanics, which can be broadly summarized by the three laws of motion or Newton’s laws of mechanics.
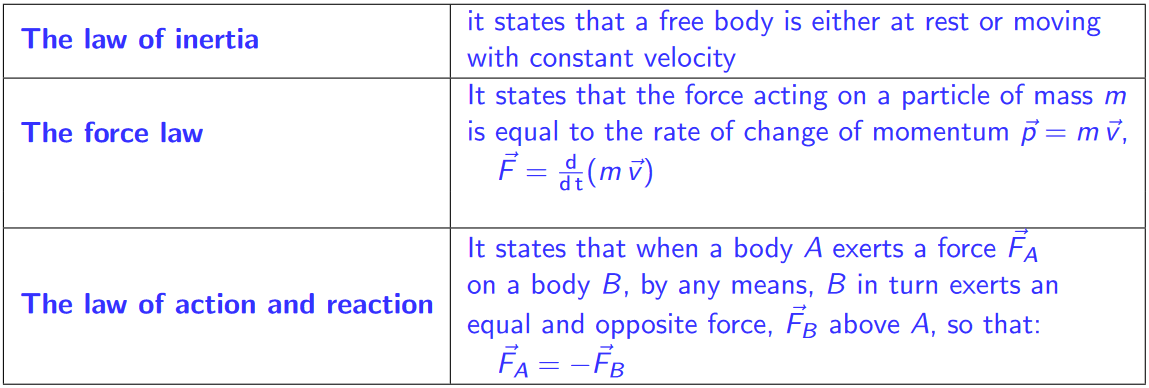
The law of inertia defines the equilibrium condition of a body and this is a consequence of the quantity of motion (momentum). Both laws, this and the law of action and reaction, can be derived from the law of force, assuming that this is the most fundamental law of mechanics. Alternately, the law of conservation of momentum can be considered the most basic law in mechanics.
Consider a cluster of n particles that move freely and are not subject to external forces. Assuming that there is a very large arbitrary number of forces acting between the particles of this system. Let’s represent algebraically, the masses and velocities associated with the particles as:
The law of conservation of total momentum states that the total momentum of the group of particles is composed of the vector sum of their momentum, and that this sum remains constant although the individual momentum may vary. I.e,
or
Thus, if the momentum of one of the particles changes, the momentum of at least one other particle must also change to keep the sum constant in the equation. The interaction between these particles causing the said supporting action is called force, and Newton’s second and third laws follow as a deductive consequence.
Thus the principle of conservation of momentum taken with its logical consequence serves to define the notion of force. Therefore, the concept of force loses much of its relevance, and by a lot, both at the microscopic level of quantum mechanics and at the macroscopic level of the general theory of relativity.
o study the classical motion of a particle, its mass m is taken as a constant value, so the equation of force unfolds as:
The vector r is the position vector of the particle with respect to the origin of an arbitrary inertial frame of reference, an example:
It is good to emphasize that the reference system is not conventionally based on Cartesian, it can be with spherical or cylindrical coordinates or any other constituted by three orthogonal spatial coordinates.
The equation of motion that gives the position as a function of time t is obtained by integrating the equation of force, which results in a solution of the type:
that is, a time-varying vector function based on six constants of integration. The determination of these constants is based on the fundamental assumption that at some initial time, when t = t₀, both the position of the particle and its velocity are known simultaneously and with absolute precision. The theoretical possibility of obtaining such values is unquestionable. Your achievements are based solely on our ability to perform the measurement.
The coordinate transformation is simply a set of algebraic relations between the coordinates of the first reference system and the coordinates of the second one of interest. In classical mechanics, this is the Galilean transformation.
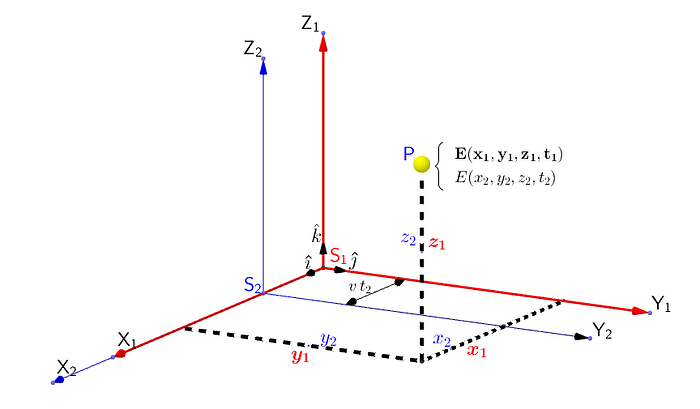
Referring, for example, to the illustration, we see that S₁(x₁,y₁,z₁,t₁) indicates an arbitrary inertial coordinate system and also S₂ a reference system that moves with respect to S₁ with constant velocity v.
Then the coordinates of an event E(x₁,y₁,z₁,t₁) in S₁, which takes place at a point P, are related to the coordinates of that same event E(x₂,y₂,z₂,t₂) about the same point P in S₂ for the expressions:
This set of equations defines the Galilean transformation of Cartesian axes. There are changes in the algebraic form when other coordinate systems are applied, such as spherical coordinates or cylindrical coordinates. This scenario was shown in order to show the relative velocity v along the X axis of both reference systems. And this with the effect of equating the numerical values of the y and z coordinates in both reference systems, as indicated in the position equation.
As for the equality between t₁ and t₂, it is understood that the value of time measured at any instant and in any place, whether the observer is positioned in S₁ or in S₂, is independent of the relative movement and such equality of measure becomes a fundamental assumption.
The Galilean transformation of velocity is determined by means of the hourly equation of the position by the following demonstration:
so that the velocity of a moving particle measured at point P with respect to the system S₁ is
The classical composition of velocities is then given by
and going further, one finds the relationship between the measured accelerations of the two coordinate systems, i.e.,
So that Newton’s laws are shown to be invariant in both S₁ and S₂ systems. And therefore the S₂ system is also inertial.
It is important to emphasize that the transformation is an operation with several representations, one of them made by the system of equations just presented
The immediate consequence of the Galilean transformations is the classical principle of relativity, which states that the laws of mechanics are invariant in form for all inertial reference frames that move relative to each other, with a velocity of constant value, this small when compared to the value of the speed of light in vacuum.
Classical mechanics has so far been described on the basis of the concept of forces acting on bodies, or masses (Newton’s laws), or as an alternative, on the basis of the principle of conservation of momentum (momentum). However, there are other starting points to provide approximations of physical reality, of course all of them must present the same results, despite making use of different concepts, as they offer particular advantages in their applications in real problems.
A very important approximation (model) in classical mechanics is based on Hamilton’s principle.
This principle considers a dynamic situation in which, following the scheme shown in the figure, a particle travels between points A and C in a time t = t₂ — t₁ under the influence of forces. The kinetic energy K and potential energy V in this process are defined as a function of position and time along the path.
Hamilton’s principle states that the integrals
of the different functions (K-V) over time t = t₂ — t₁ are the same when taken along any real path as in question, ABC, or any slightly different path as ADC.
The quantity (K-V) is called the Lagrangian function or kinetic potential. The time integral between two points along a dynamic path is said to have a stationary value with respect to the same integral taken over any other allowed paths, that is,
Also, the value of the integral S along a given path is a minimum value, compared to its value along any other path, in many situations of interest.
All the laws of classical mechanics (dynamics) can be derived from Hamilton’s principle, and this provides a system of mechanics based on energy rather than vector quantities such as forces and momentum.
Given that energy (in its many forms) appears to be the primordial quantity from which our entire physical universe is formed, this suggests that the Hamiltonian model of mechanics is the most fundamental.